Control Drive
Using ROS and Gazebo to simulate a Differential Drive Robot.
Check out the project on Github
Requirements: Link to heading
- ROS2 Humble
- Gazebo (Ign)
Building Link to heading
colcon build
Launching Gazebo (Ign Gz): Link to heading
ros2 launch control_drive gazebo.launch.py
Launching rviz Link to heading
ros2 launch control_drive display.launch.py
Change Fixed Frame in Global options to odom
Test linear velocity publisher Link to heading
ros2 topic pub /control_drive_controller/cmd_vel_unstamped geometry_msgs/msg/Twist "{linear: {x: 1.0, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.5}}"\
Run with teleop twist keyboard Link to heading
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args --remap cmd_vel:=/control_drive_controller/cmd_vel_unstamped
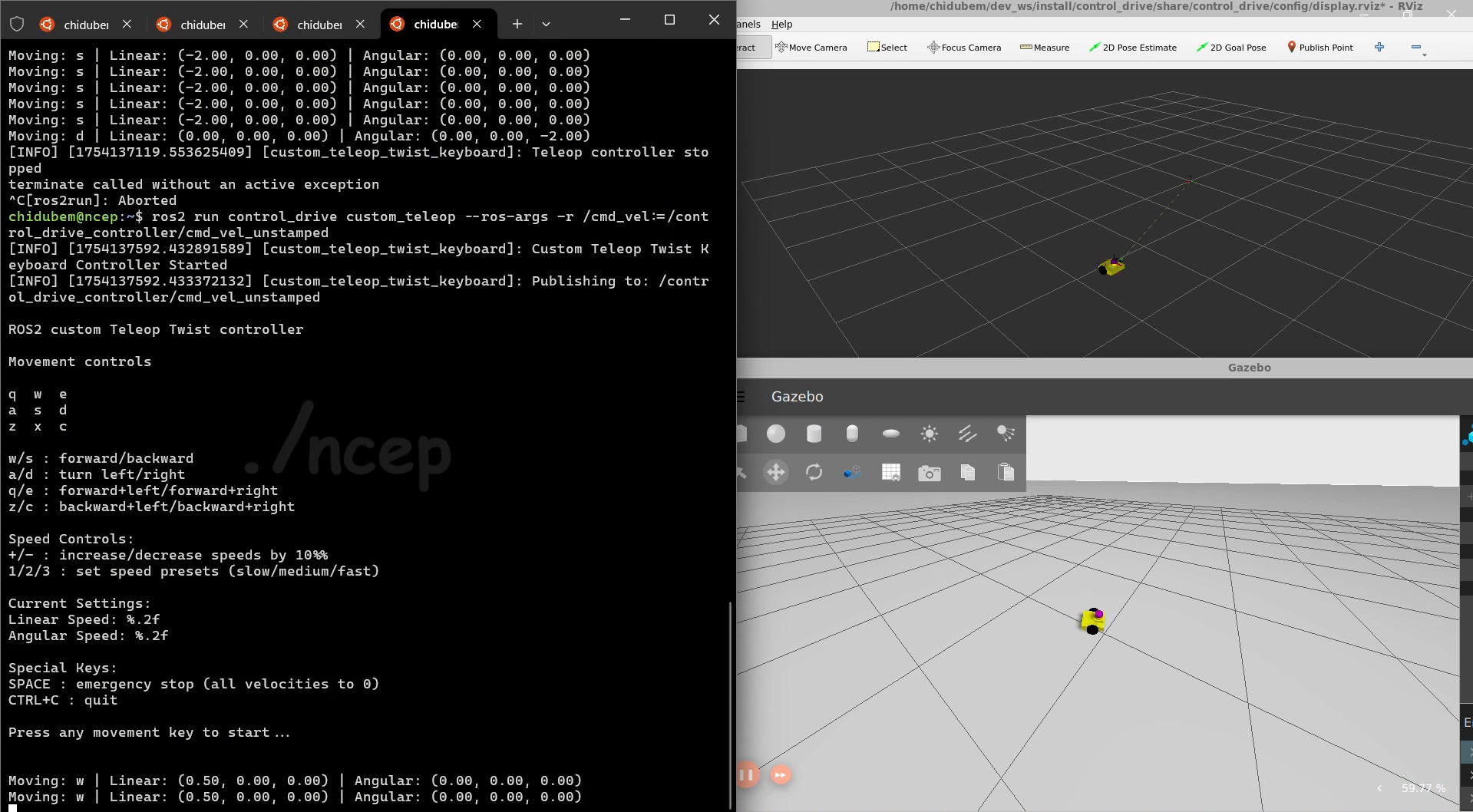
custom teleop control Link to heading
Custom control script in control_drive/custom_teleop.py
ros2 run control_drive custom_teleop --ros-args -r /cmd_vel:=/control_drive_controller/cmd_vel_unstamped